Colour Sorting Robot
Product Design
Project Overview
I designed and built a semi-autonomous robotic arm to detect, pick up, and sort coloured blocks into user defined storage locations. We named this robot KEVIN: Kinetic Extraction and Visual Identification Navigator.
So how did it work? KEVIN was equiped with a colour sensor on its claw and a distance sensor at its base. Spinning in a circle, it uses its distance sensor to scan for objects and extends the claw to pick up those within reach. Then, using the colour sensor on the claw and the locations of storage bins, KEVIN either drops the object into its designated bin or into a "discard bin" for objects with colours without a designated storage location. Throughout this process, KEVIN will print its current action on its screen, ensuring the user knows what is happening at all times.
Mechanical System
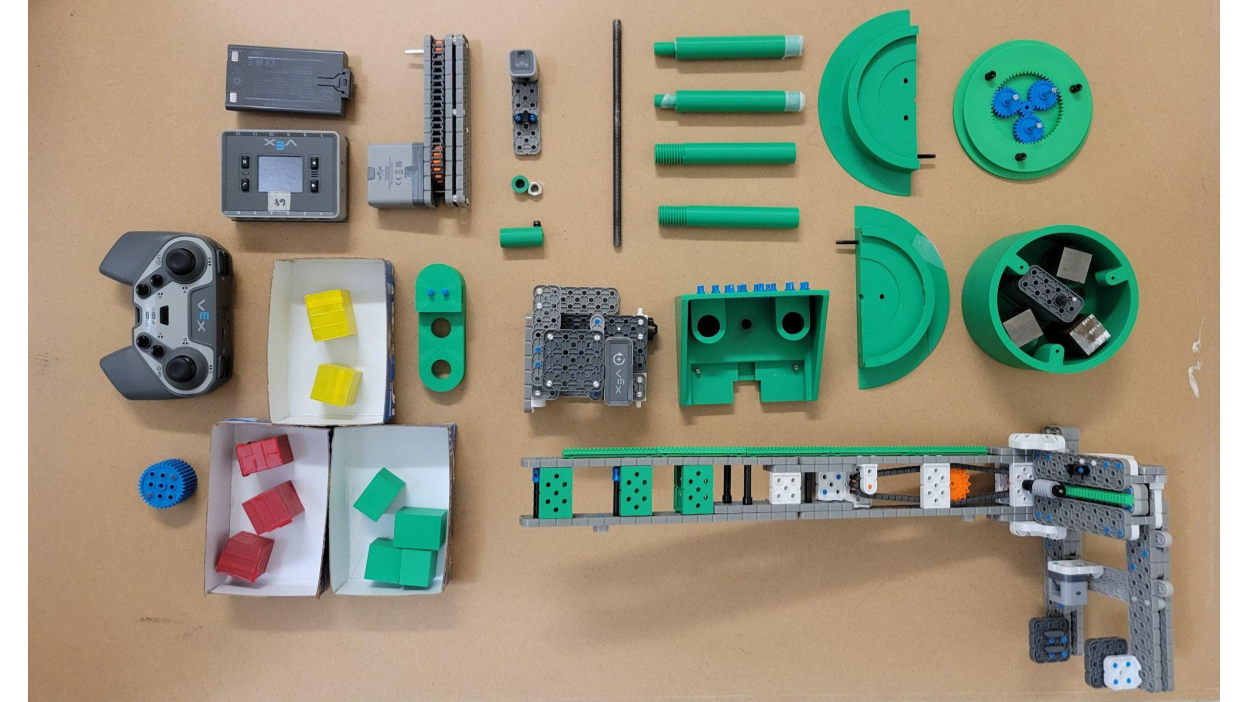
The robot’s physical design gives it three controlled degrees of freedom—horizontal rotation, horizontal extension, and vertical lift—along with a fully actuated claw for picking up objects. All components were fabricated from the remains of a broken-apart VEX IQ robot and custom 3D-printed components.
Horizontal Rotation - Planetary Gear Base:
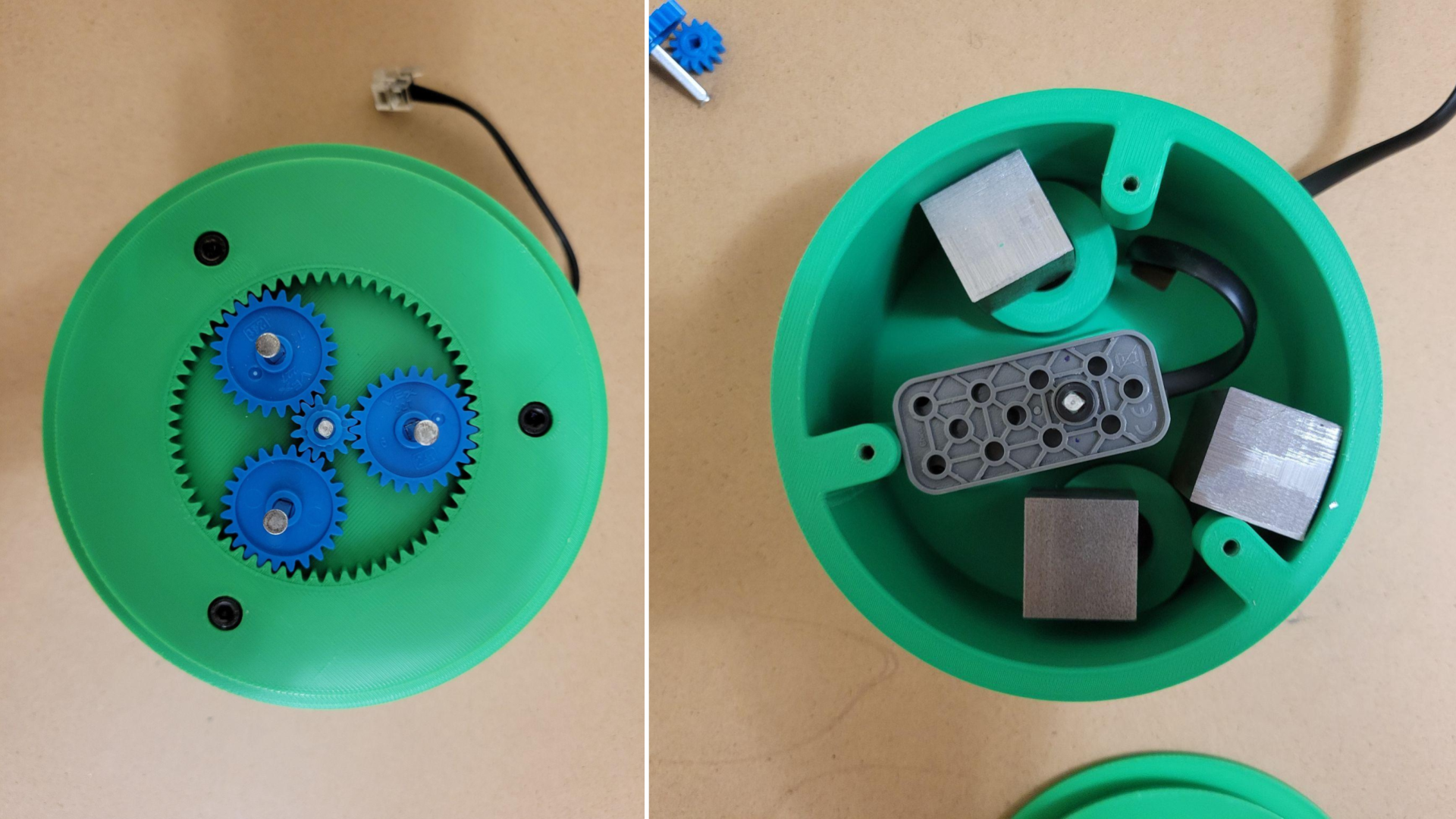
KEVIN’s horizontal rotation is powered by a motorized planetary gear system at its base, allowing it to spin 360 degrees to scan for and pick up objects. A VEX motor drives a 12-tooth sun gear, turning three planet gears inside a fixed 60-tooth ring. This 5:1 reduction provides a high-torque output, ensuring smooth and precise rotation even when the arm is extended with a load. This design choice was crucial for KEVIN’s ability to effectively navigate its environment and sort objects accurately.
Horizontal Rotation - Planetary Gear Base:
KEVIN’s horizontal rotation is powered by a motorized planetary gear system at its base, allowing it to spin 360 degrees to scan for and pick up objects. A VEX motor drives a 12-tooth sun gear, turning three planet gears inside a fixed 60-tooth ring. This 5:1 reduction provides a high-torque output, ensuring smooth and precise rotation even when the arm is extended with a load. This design choice was crucial for KEVIN’s ability to effectively navigate its environment and sort objects accurately.
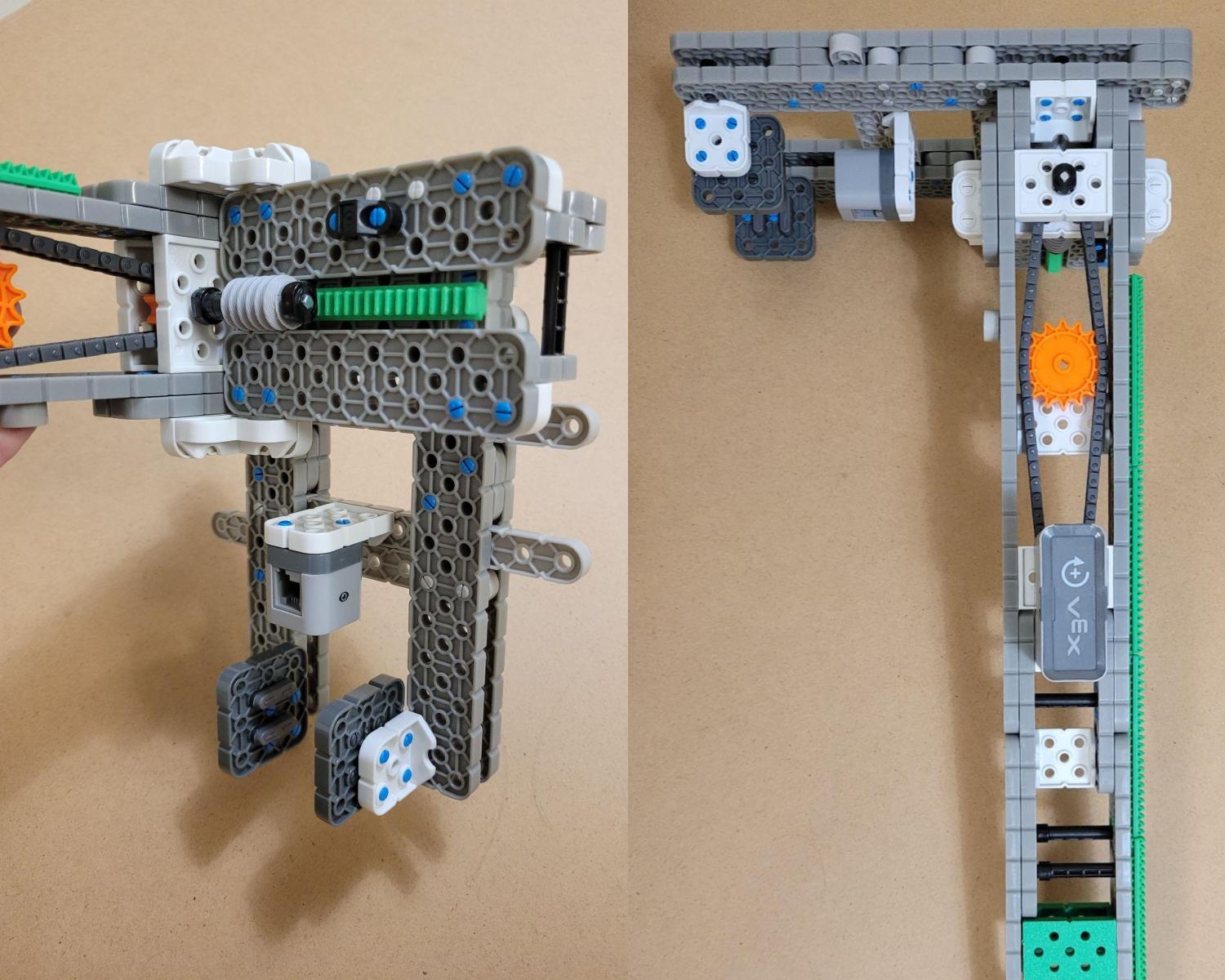
Horizontal Extension - Rack and Pinion Arm:
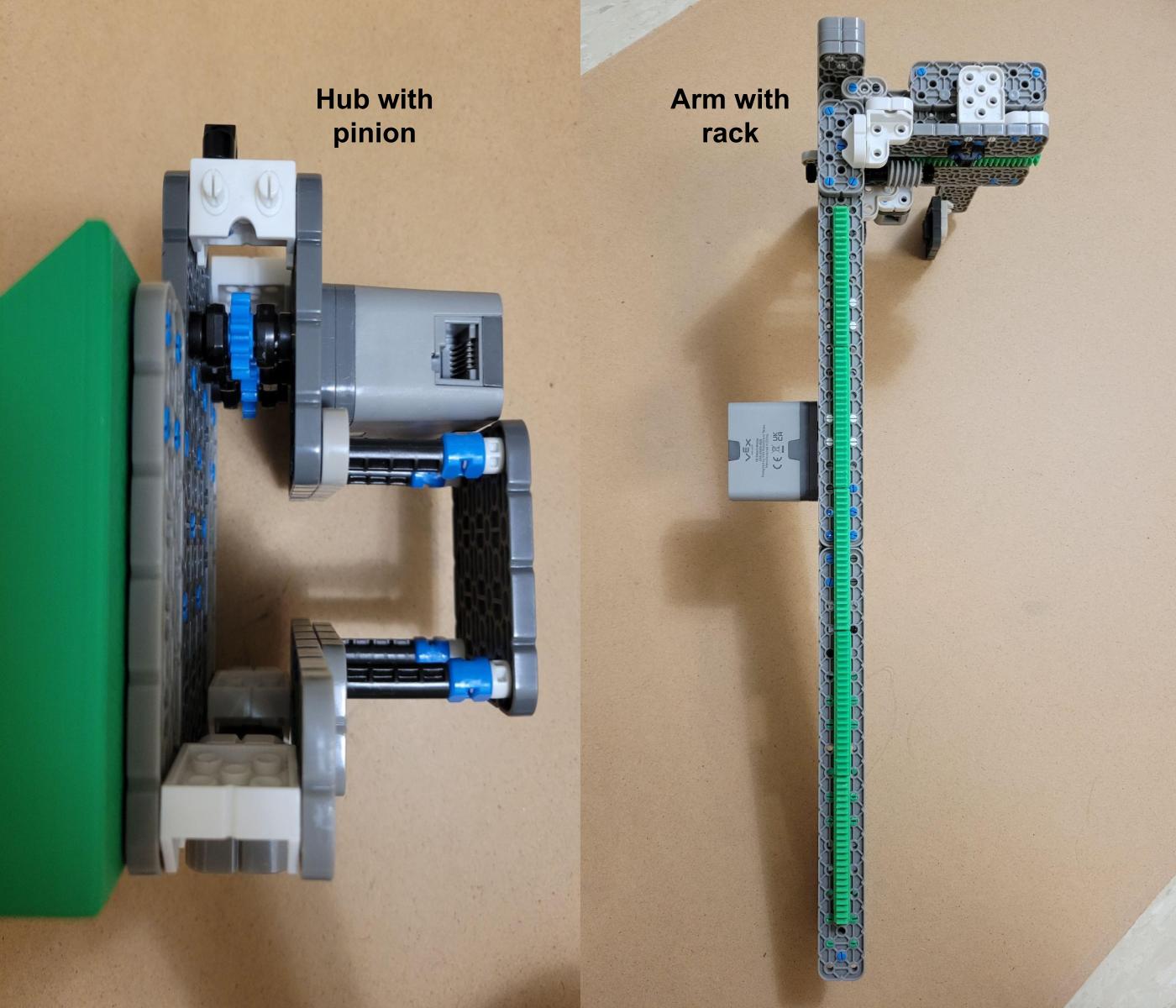
The arm’s horizontal extension is achieved through a rack and pinion mechanism mounted along the top of the arm, allowing the arm to extend and retract along a linear axis. A motorized pinion gear engages with a linear rack attached to the arm, allowing the simple rotation of a VEX motor to be converted into controlled linear motion. Additional free-spinning pinions distribute mechanical load so the rack never disengages—a crucial component of the arm to reduce skipping and slippage. The entire arm is reinforced using both VEX plates and custom 3D-printed connectors to minimize flex and maximize stability during extension and retraction, even when handling heavier objects. This design choice provided precise control over the arm's position and was key to KEVIN’s ability to sort objects at varying distances with precision and reliability.
Horizontal Extension - Rack and Pinion Arm:
The arm’s horizontal extension is achieved through a rack and pinion mechanism mounted along the top of the arm, allowing the arm to extend and retract along a linear axis. A motorized pinion gear engages with a linear rack attached to the arm, allowing the simple rotation of a VEX motor to be converted into controlled linear motion. Additional free-spinning pinions distribute mechanical load so the rack never disengages—a crucial component of the arm to reduce skipping and slippage. The entire arm is reinforced using both VEX plates and custom 3D-printed connectors to minimize flex and maximize stability during extension and retraction, even when handling heavier objects. This design choice provided precise control over the arm's position and was key to KEVIN’s ability to sort objects at varying distances with precision and reliability.
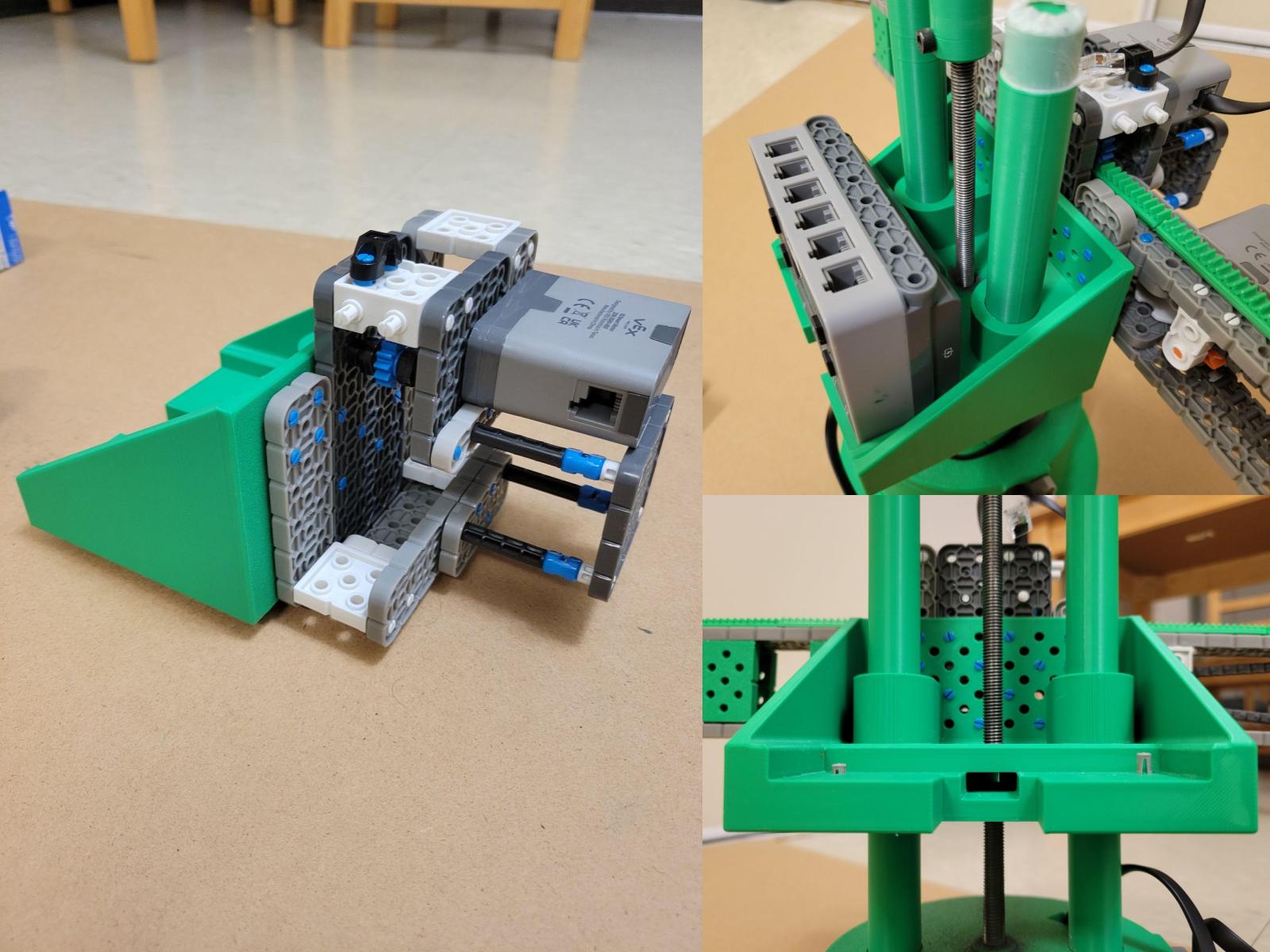
Vertical Lift - Lead Screw Elevator:
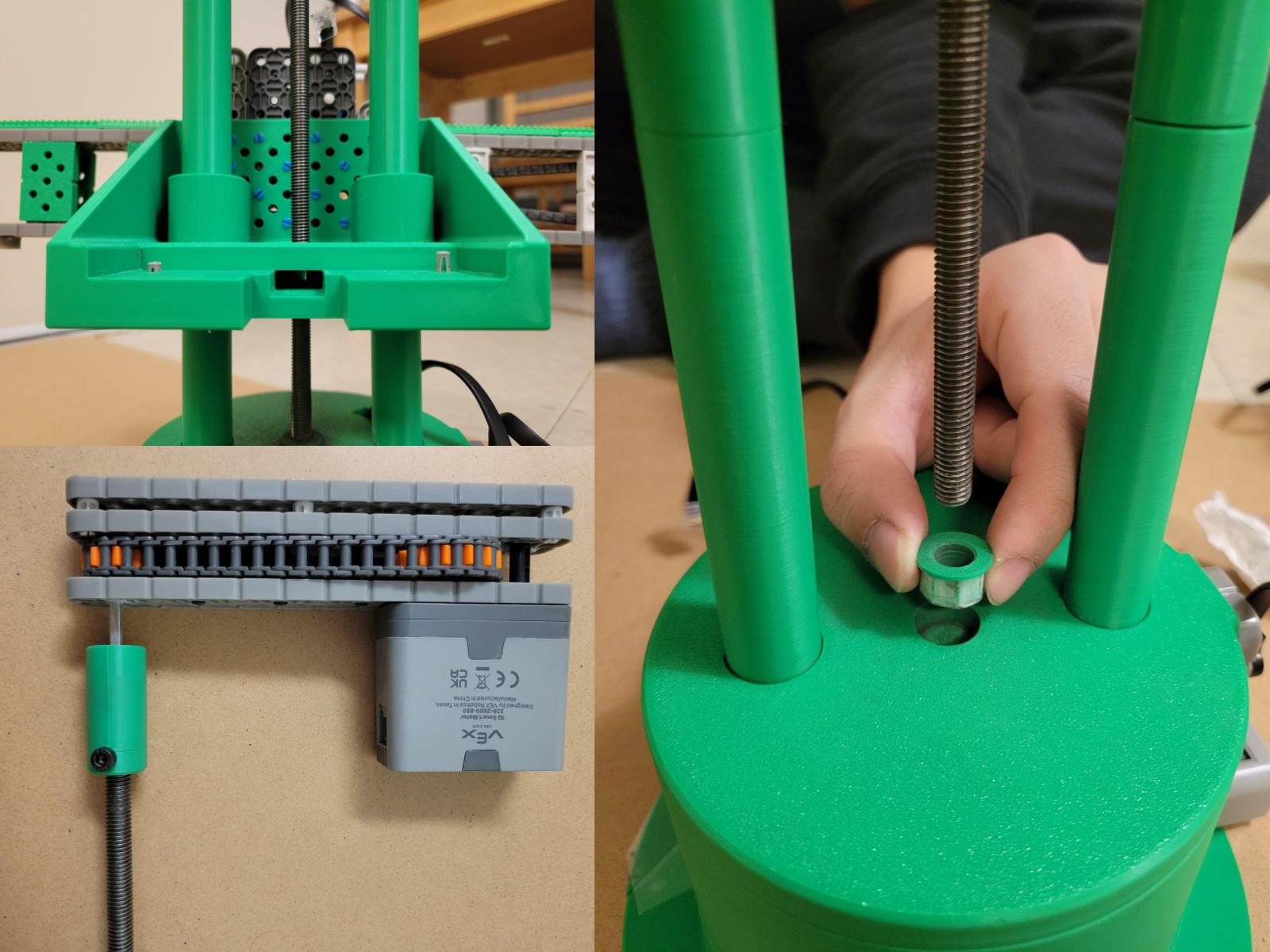
A centrally mounted lead screw mechanism provided vertical lift to the arm and claw. A VEX motor, geared 2:1 for speed, drives a shaft coupler connected to an M8 threaded rod acting as a lead screw. The Central Hub sits on this rod, connecting to the arm and claw. Support poles, 3D-printed in interlocking segments, guide the Hub's vertical motion and ensures that it does not wobble during operation. This mechanism provided a compact and efficient solution to convert the rotational motion of a motor into the linear motion needed for vertical lift.
Vertical Lift - Lead Screw Elevator:
A centrally mounted lead screw mechanism provided vertical lift to the arm and claw. A VEX motor, geared 2:1 for speed, drives a shaft coupler connected to an M8 threaded rod acting as a lead screw. The Central Hub sits on this rod, connecting to the arm and claw. Support poles, 3D-printed in interlocking segments, guide the Hub's vertical motion and ensures that it does not wobble during operation. This mechanism provided a compact and efficient solution to convert the rotational motion of a motor into the linear motion needed for vertical lift.
Claw - Worm Gear Claw:
KEVIN's claw has a parallel gripper machanism, where a worm-gear-to-rack mechanism to slide one claw plate inwards and outwards while the other stays stationary. This design allows the stationary jaw to line up to the target object while the other moves linearly, ensuring that the gripping plates remain parallel as they open and close, and providing a stable and precise grip on objects of varying sizes. A chain-and-sprocket transmission links the claw motor (which is mounted near the center of the arm to optimize balance) to the worm gear. A colour sensor mounted between the jaws allows for the accurate identification of the picked-up object.
Claw - Worm Gear Claw:
KEVIN's claw has a parallel gripper machanism, where a worm-gear-to-rack mechanism to slide one claw plate inwards and outwards while the other stays stationary. This design allows the stationary jaw to line up to the target object while the other moves linearly, ensuring that the gripping plates remain parallel as they open and close, and providing a stable and precise grip on objects of varying sizes. A chain-and-sprocket transmission links the claw motor (which is mounted near the center of the arm to optimize balance) to the worm gear. A colour sensor mounted between the jaws allows for the accurate identification of the picked-up object.
Central Hub:
At the core of KEVIN's design is a 3D-printed central hub that serves as the main structural component of the robot, providing a stable connection point for the arm, vertical lift mechanism, and VEX brain. The Hub also supports the motor for the horizontal extension of the arm, centralizing electrical components to reduce cable length requirements. This resolves a major design constraint while allowing for more efficient use of space within the robot's compact frame. The Hub helps concentrate KEVIN's center of gravity to the middle of the robot, a key factor in the robot's overall performance and reliability. By helping KEVIN maintain balance and stability during operation, the robot can ensure smooth and precise movements when handling heavier objects.
Central Hub:
At the core of KEVIN's design is a 3D-printed central hub that serves as the main structural component of the robot, providing a stable connection point for the arm, vertical lift mechanism, and VEX brain. The Hub also supports the motor for the horizontal extension of the arm, centralizing electrical components to reduce cable length requirements. This resolves a major design constraint while allowing for more efficient use of space within the robot's compact frame. The Hub helps concentrate KEVIN's center of gravity to the middle of the robot, a key factor in the robot's overall performance and reliability. By helping KEVIN maintain balance and stability during operation, the robot can ensure smooth and precise movements when handling heavier objects.
Control System
All software was developed using VEXcode and runs on a VEX Brain, fully utilizing the VEX parts available to us. The control system is semi-autonomous, allowing KEVIN to perform its sorting tasks with minimal user input while still providing feedback and control options to the user. For example, users can start and stop KEVIN's operation at any time using the VEX controller. The robot also provides real-time feedback of its status through the VEX Brain's screen, displaying its current actions to keep the user informed. Software is organized into a clear modular structure that allows for easy maintenance and future iterations. It is divided into four integrated layers: calibration, user setup, movement control, and automation. Each layer handles a distinct part of the workflow, letting the robot execute complex tasks through simple reusable functions.